四川定制工业机器人地轨






- 面议
- 2025-01-22 01:53:53
- 工业机器人地轨,机器人第七轴,机器人地轨..
- 万经理 18011761607
- 广州第七轴智能设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
工业机器人地轨是通过它的控制系统来控制机器人的移动的,机器人安装在行走轴的滑座上,通过控制系统按照路线移动。机器人的移动就是行走轴上机械手移动小车的直线方向上的移动,通过操作和显示屏进行编辑,在有效行程范围内,基本速度在1.2m-1.8m之间,可按照客户要求调节。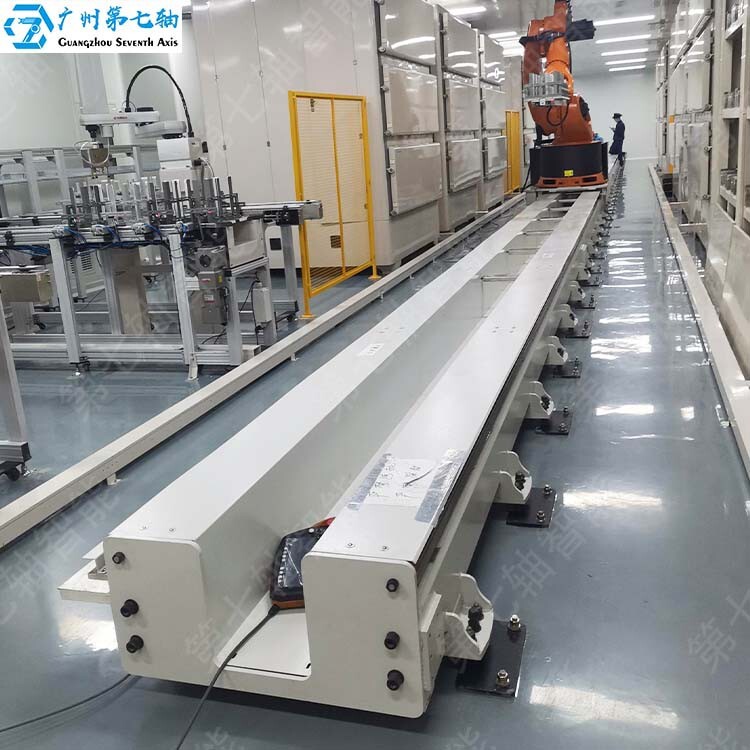
工业机器人地轨在工业中常见的种类就有地面行走轴、侧面行走轴、底挂行走轴、高架行走轴四种。
1.地面行走轴:在工业化生产中有全封闭和半封闭式。地轨负载可分为重型和轻型,通常是从事上下料、搬运、码垛工作。
2.侧面行走轴:关节机器人侧挂行走轨道,这类负载较轻,在机器人焊接、喷涂、汽车行业比较常见。
3.底挂行走轴:这类一般都是机器人倒挂在行走轴的轨道,在五金制造、磨具行业比较常见。
4.高架行走轴:这类需要机器人到高空作业的行走轨道,行业内叫天轨,是根据企业用户需求定制,一般用于大型的金色制品,例如油缸、滚筒、打磨抛光工作站。
工业机器人地轨的使用注意事项
1.注意定期维护和清理,其正常运转。
2.注意使用中的防尘。工厂环境中,生产工件很容易出现各种尘土或者细微颗粒物,这些如果进入到地轨内部会造成设备故障,因此一定要做好预防工作。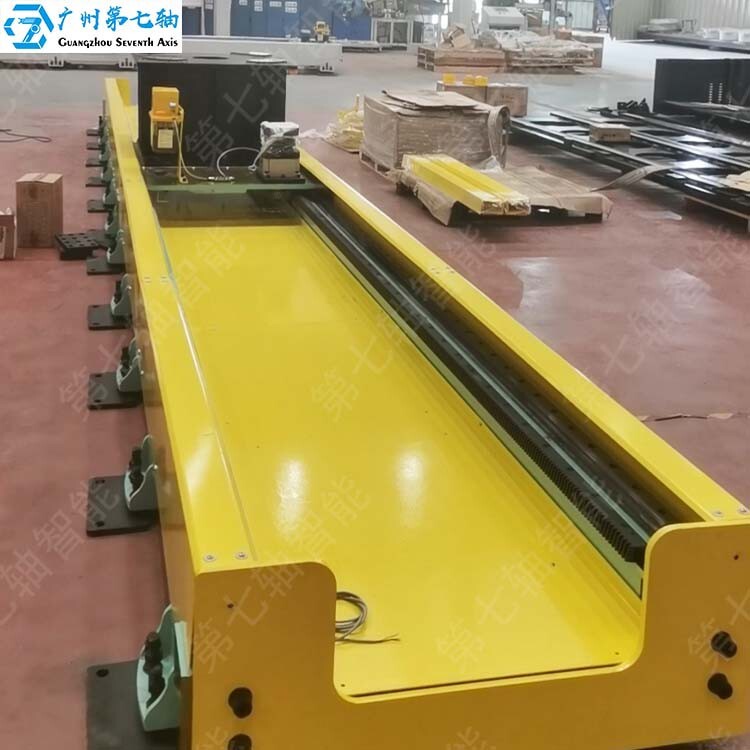
工业机器人地轨的系统功能
1.系统程序控制:地轨系统与“模架”的信号接口及系统接口全部都是采用数字信号传输,从而互相之间的稳定性以及牢靠性。具备手动和自动两种运转控制方式,手动当时下可单操作某一个工作,自动方式下按设定的运转程序自动运转。
2.软件功能作用:完成工位无序工作,即:随机发起工作信号,七轴可以依据发起的先后顺序一次完成工作;并且在信号复位后可以肃清掉一些未执行的信号。
3.急停连锁公用:随意激起任何一个急停按钮,七轴可以立刻中止正在完成的动作,只要在该急停重新复位后设备才回复正常运转。
4.信号保障性:在较短的时间内连续给出两次信号,机器人行走轴只执行一次信号而不会连续工作两次;在程序晋级后,有完好的系统备份。
5.移动与定位:可经过操作面板及显示屏直接编辑,理论上在直线轴有效行程范围内,能够设置无数个定位点。位置精度有编码器准确检测,经过伺服系统控制电机,精度在±0.5mm范围之内。
6.保养及维护:外用钥匙维护开关,当某个模架不用时(如:某个模架呈现毛病需维修),采用外用钥匙维护开关跳过此模架,这样不会由于人为的误操作或其他的不测而造成产品的报废。
7.急停按钮:每台模架具备在紧急状况时终止整个系统的急停按钮。
8.系统接口:一切硬件接口和软件功用由提供方对接,所有客户的需求。
工业机器人地轨基础组件的特点
1.基座:工业机器人地轨基座有焊接型和铸铁型两处,焊接适合负载比较轻的场合,铸铁适合负载重的场合。
2.滚轮导轨:矩形滚轮导轨+矩形齿条滚轮导轨(导轨上直接+工齿条成为一体式齿条导轨)传动式机器人行走轴系统。
3.齿轮:齿轮组件,带有回差调节机构,方便调整齿轮和齿条之间的啮合间隙。采用这种齿轮组件,将使齿轮齿条传动机构的设计和装配变得简单,实现齿轮齿条传动系统的自动润滑,延长工业机器人地轨的使用寿命,降低故障率。
工业机器人地轨安装基础
3.可采用方钢上焊接钢条作为安装基础,钢条上铣出导轨安装基准。
4.设备安装调试的时候,要两根方钢上的安装基准面的平行度。
5.机器人安装底座采用高强度钢板,把滚轮组合,伺服和机器人的安装基准面和孔位加工出来。
- 工业机器人地轨,机器人第七轴,机器人地轨..
- 铸造机械设备
- 万经理



