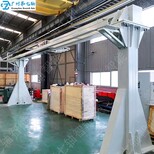
大渡口工业机器人单臂桁架,机器人桁架机械手





- 面议
- 2025-03-26 02:32:39
- 机器人单臂桁架,机器人桁架,机器人桁架机..
- 万经理 18011761607
- 广州第七轴智能设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
机器人桁架机械手能够搬运物体、操作工具,以完成各种作业,其速度快,精度高,防尘性和防污性优良,为满足实际机床生产线的需要设计整套无聊搬运及储存设备。
机器人桁架机械手的7大特点
1.设备符合行业质量标准;
2.特性:可根据工厂的不同行业、不同产品的搬运量身定制;
3.安全性:降低重物或者有害物质对人工产生危险或危害,安全性高;
4.:机器人桁架机械手各轴以较高的速度直线运动,伺服电机可快速响应;
5.:重复误差可达0.05mm;定位精度可达0.02mm(精度可根据生产成本适当调节)
6.高强度:24小时持续工作;
7.:机器人桁架机械手负载重量单,生产成本低;
8.操作简单:基于直角坐标系统,运动参数相对简单。
在现代经济发展中,许多行业面临劳动力流失率高、交货期缩短、安全问题等诸多问题。桁架机械手可以一个接一个地处理和解决问题。桁架式机械手的简单性让人们可以参与到生产过程的监控中,这是对无人自动化行业的逐步替代,更适合本土企业现有的生产管理模式,更接地气和更具有可行性。
桁架机械手是如何上下料的
1、桁架机械手的上料过程的动作:数控机械手臂沿X轴运动到工件取料位置的上方后停止,然后Z轴向下运动使张开的手爪刚好能抓住工件,闭合手爪抓住工件后,使Z轴再向上运动到高度,然后再沿X轴方向运动到工作台卡盘正上方,然后Z轴向下运动把工件装入卡盘或工装内。然后卡盘夹紧,Z轴上升到超出机床防护罩上方,X轴再运动到等待位置等待机床完成工件的加工。
2、桁架机械手下料过程的动作:完成工件加工后,X轴运动到卡盘的正上方,Z轴向下运动使手爪刚好能抓住工件,然后给气压使手爪合并抓住工件,卡盘松开,Z轴向上运动到合适的高度,然后沿X轴方向运动直至Z轴到放料位置,Z轴下降到放料点,张开手爪放料完成后提升Z轴,再转入下一个上料过程。
桁架机械手操作步骤
1)进入桁架机械手安全区域之前,请确保关掉主电源以及气压源,并将气、电源接头卸下。在操作桁架机械手之前务必要注意检查电器控制箱内是否有水、油进入,若电器受潮,切勿开启设备,并且要经常检查供电电压是否符合设备运行,线路是否正常;
2)验证电机的转方向是否一致,然后打开电源;
3)在龙门桁架机器手需要拆除的时候,其中对关掉射出机电源、关掉机械手电源,关掉机械手气压源;
4)洩除空压。放松引拔气缸固定板固定螺丝,并移动手臂,移动缓冲器座,使其靠近手臂;
5)旋紧引拔气缸固定板,让手臂不能移动,将旋转安全螺丝锁好,使桁架机械手不能旋转等。
桁架机械手需要及时润滑
桁架机械手的滚珠丝杆和直线导轨都须在使用了一定的时间以后,及时加注优良的锂基润滑脂,保持润滑而可以减少因为干燥摩擦产生的影响。但是如果丝杆和导轨在出厂之前已经加注过润滑脂,则使用之后无需再加注。
- 机器人单臂桁架,机器人桁架,机器人桁架机..
- 铸造机械设备
- 万经理



