广州第七轴智能设备有限公司
 第5年
第5年

 第5年
第5年 
第5年

来源:广州第七轴智能设备有限公司 时间:2024-11-30 02:58:24 [举报]
桁架机器人在灵活性、实用性、使用性、生产效率以及性价比上都较为均衡适中。从功能的角度来看:
1、多轴的联动控制使其能够任意角度的准确定位、抓取和放置工件;
2、桁架机器人的Z轴上下垂直运动使其可适应不同机床工作台面的高度落差,能适配市面上大部分机床设备;
3、桁架机器人臂的水平伸缩可避免手臂摆动过程中对外物的干涉碰撞,又可以减小摆动时的转动惯量;
4、桁架机器人R轴的转动使其可实现工件的翻转、侧挂等工艺动作;
5、紧凑的本体结构和重量,安装占位空间小、移动“调岗”方便简单;
6、开放式可编程技术,示教设定灵活,普通熟练人员三分钟即可设定完毕;
7、智能运动控制卡可存储多种产品工艺信息,随时方便切换,一次设定即可长期使用。
数控机床桁架机器人是一种模拟人手操作的自动化机械,它能够按照固定程序抓取、搬运物件或操持夹具完成某些特定的操作。应用上下料机械手可以代替人从事单调、重复或繁重的体力劳动,实现生产的机械化和自动化,代替人在有害的环境下的手工操作,改善劳动条件,人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
桁架机器人维护保养法则
1.每天做好各导轨面的清洁润滑,有自动润滑系统的桁架机器人要定期检查、清洗自动润滑系统,检查油量,及时添加润滑油,检查油泵是否定时启动打油及停止。
2.每天检查主轴箱自动润滑系统工作是否正常,定期更换主轴箱润滑油。
3.注意检查桁架机器人电器柜中冷却风扇是否工作正常,风道过滤网有无堵塞,清洗沾附的尘土。
4.注意检查冷却系统,检查液面高度,及时添加油或水,油、水脏时要更换清洗。
5.注意检查桁架机器人液压系统油箱油泵有无异常噪声,工作油面高度是否合适,压力表指示是否正常,管路及各接头有无泄露。
6.注意检查导轨、桁架机器人防护罩是否有效。
7.注意检查各运动部件的机械精度,减少形状和位置偏差。
8.每天下班做好桁架机器人清扫卫生,清扫铁屑,擦净导轨部位的冷却液,防止导轨生锈。
为了使数控机床机器人保持良好状态除了发生故障应及时修理外,坚持经常的维护保养是十分重要的。坚持定期检查经常维护保养可以把许多故障隐患消灭在萌芽之中防止或减少事故的发生。及时正确的保养会使数控机床机器人的使用寿命延长,性能提高,既省钱又免去许多维修带来的苦恼。时下“以修代保养”的观念,在数控机床机器人使用中仍旧存在。因缺乏保养或保养不当引起机器人故障屡有发生,所以正确的保养是延长机器人使用寿命、设备连续运行的重要环节。
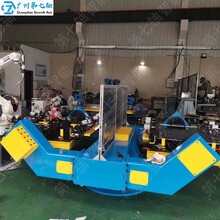
近年来,工业机器人的应用越来越广泛,而桁架机器人作为机器人的一种,也不单一的只有一个这个功能,而且集合搬运、装卸、码垛于一体的多功能机器人。
桁架机器人在使用时需要注意事项
随着国内工业自动化的快速发展,桁架上下料在工业生产中,得到了广泛的应用,由于在日常使用桁架上下料的过程中,会遇到各种各样的问题,给企业造成一些不必要的损失,那么该如何避免和解决这些问题呢?
1、先排出故障然后调试
对于调试和故障并存的电气设备,应该先排除故障,然后再进行调试,调试在电气线路正常的情况下进行。
2、先外面后里面
应先检查设备表面有无明显裂痕、缺损,了解其维修史、使用年限等,然后再对机器内部进行检查。拆前应排除周边的故障因素,确定为机内故障后才能拆卸,否则,盲目拆卸,可能将设备越修越坏,造成不必要的损失。
3、先机械部分后电气部分
只有在确定机械零件无故障后,再进行电气方面的检查。检查电路故障时,应利用检测仪器寻找故障部位,确认无接触不良故障后,再有针对性地查看线路与机械的运作关系,以免误判。
4、电器部件更换,先外围后内部
先不要急于更换损坏的桁架机器人电气部件,在确认外围设备电路正常时,再考虑更换损坏的电气部件。
5、日常检修,先直流后交流
检修时,先检查直流回路静态工作点,再检查交流回路动态工作点。
6、出现故障,先动口再动手
对于有故障的桁架上下料电气设备,不应急于动手,应先询问产生故障的前后经过及故障现象。对于生疏的设备,还应先熟悉电路原理和结构特点,遵守相应规则。拆卸前要充分熟悉每个电气部件的功能、位置、连接方式以及与周围其他器件的关系,在没有组装图的情况下,应一边拆卸,一边画草图,并记上标记。
7、先静态后动态
在桁架机械手未通电时,判断电气设备按钮、接触器、热继电器以及保险丝的好坏,从而判定故障的所在。通电试验,听其声、测参数、判断故障,后进行维修。如在电动机缺相时,若测量三相电压值无法判别时,就应该听其声,单测每相对地电压,方可判断哪一相缺损。
8、维护保养,先清洁后维修
对于污染较重的电气设备,先对其按钮、接线点、接触点进行清洁,检查外部控制键是否失灵。许多故障都是由脏污及导电尘块引起的,一经清洁故障往往会排除。
9、先电源后设备
日常桁架上下料电源部分的故障率在整个故障设备中占的比例很高,所以先检修电源往往可以事半功倍。
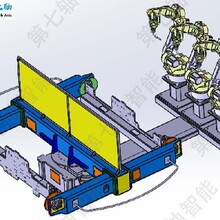
桁架机器人由主体、驱动系统和控制系统三个基本部分组成。按机器人结构分类为直角坐标型,机械手沿二维直角坐标系移动。
1.桁架机器人主体部分通常采用龙门式结构,由Y向横梁与导轨、Z向滑枕、十字滑座、立柱、过渡连接板和基座等部分组成,Z向的直线运动皆为交流伺服电动机通过蜗轮减速器驱动齿轮与Y向横梁、Z向滑枕上固定的齿条作滚动,驱动移动部件沿导轨快速运动。
2.桁架机器人移动部件为质量较轻的十字滑座和Z向滑枕,滑枕采用由铝合金拉制的型材。横梁采用方钢型材,在横梁上安装有导轨和齿条,通过滚轮与导轨接触,整个机械手都悬挂在其上。
3.桁架机器人的控制核心通过工业控制器(如:PLC,运动控制,单片机等)实现。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
标签:铜梁桁架机器人,上海桁架机器人,巫山供应桁架机器人,丰台工业桁架机器人